System Overview
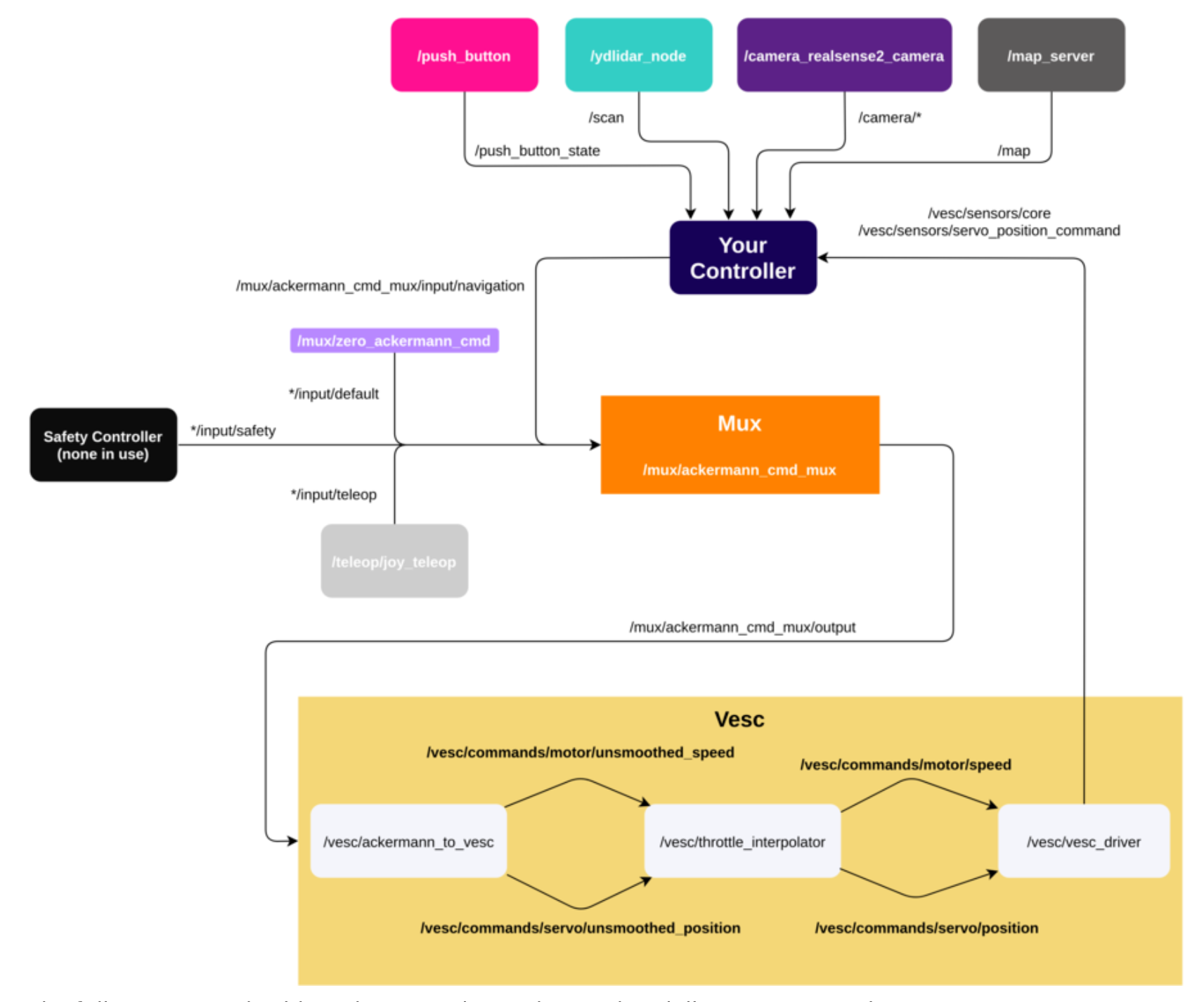
The main takeaway from this diagram should be that creating your own controller (catkin package) is as simple as subscribing to sensor nodes and publishing to Mux
NOTE
For the Ackermann steering commands, there are 4 levels:
- Safety
- teleop
- navigation
- default
Autonomous drive messages should be published to /car/mux/ackermann_cmd_mux/input/navigation
Notable Packages:
(Bullet indentations represent depth in file structure)
mushr_sim: Contains scripts for the simulation
mushr_base: Ties all other packages together
mushr_hardware: Contains launchfiles for running the car and contains the sensor packages
-
ylidar: Contains scripts and launch files for interfacing with the 2D lidar
-
realsense: Contains scripts and launch files for interfacing with realsense camera sensors (d435i and t265)
-
Vesc: Contains scripts for interfacing with the vesc