Using RVIZ
Introduction
RVIZ is a tool in ROS that can be used to visualize the information coming from the output of your ROS topics. In many cases, this can be a very useful tool for ensuring that the robot's components are working properly.
In this section, I’ll go over how to visualize information from the LiDAR and real sense camera:
Note: Make sure you’ve configured your ROS environment variables in your .bashrc file which allow you to receive information from the ARC robot
ROS_MASTER_URI=http://10.42.0.1:11311
ROS_IP=YOUR-IP
Steps:
- SSH into the robot and launch teleop.launch in mushr_base Launch the following commands:
ssh robot@10.42.0.1
roslaunch mushr_base teleop.launch
At this point, you should see a lot of output on the console detailing the startup process as the sensors turn on and topics start publishing data.
- On your base computer, run RVIZ
In a separate terminal run:
rviz
You should now see something like this:
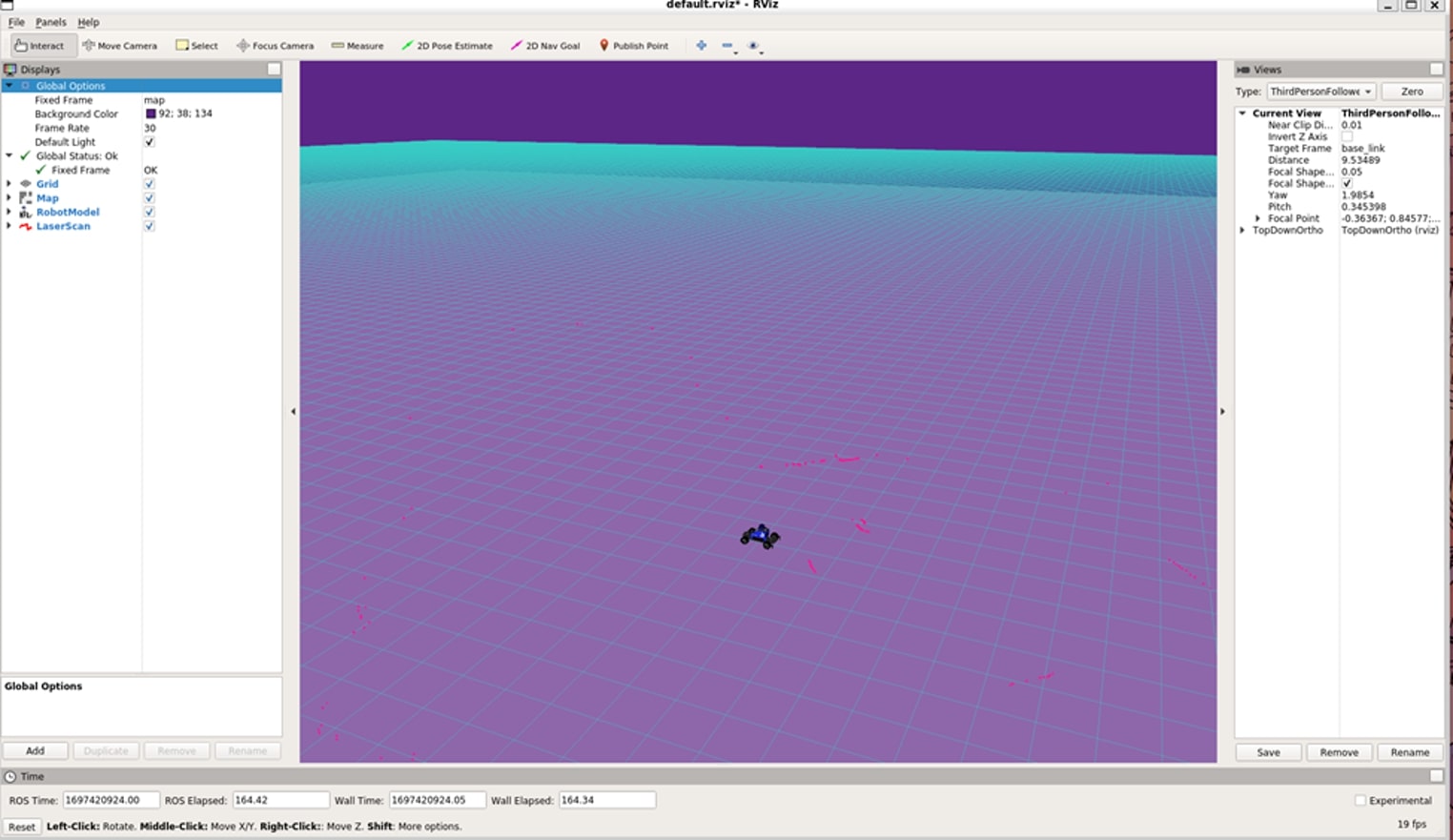
NOTE: If you do not, see the same type of map as seen in the picture then you may not have the default mushr rviz configuration. In which case, go to software install setup and make sure to add rviz.default.
- Add a topic: Real Sense d435i RGB camera image and depthcloud
Click on the add button in the bottom left corner.
This should load a new window which looks like this:
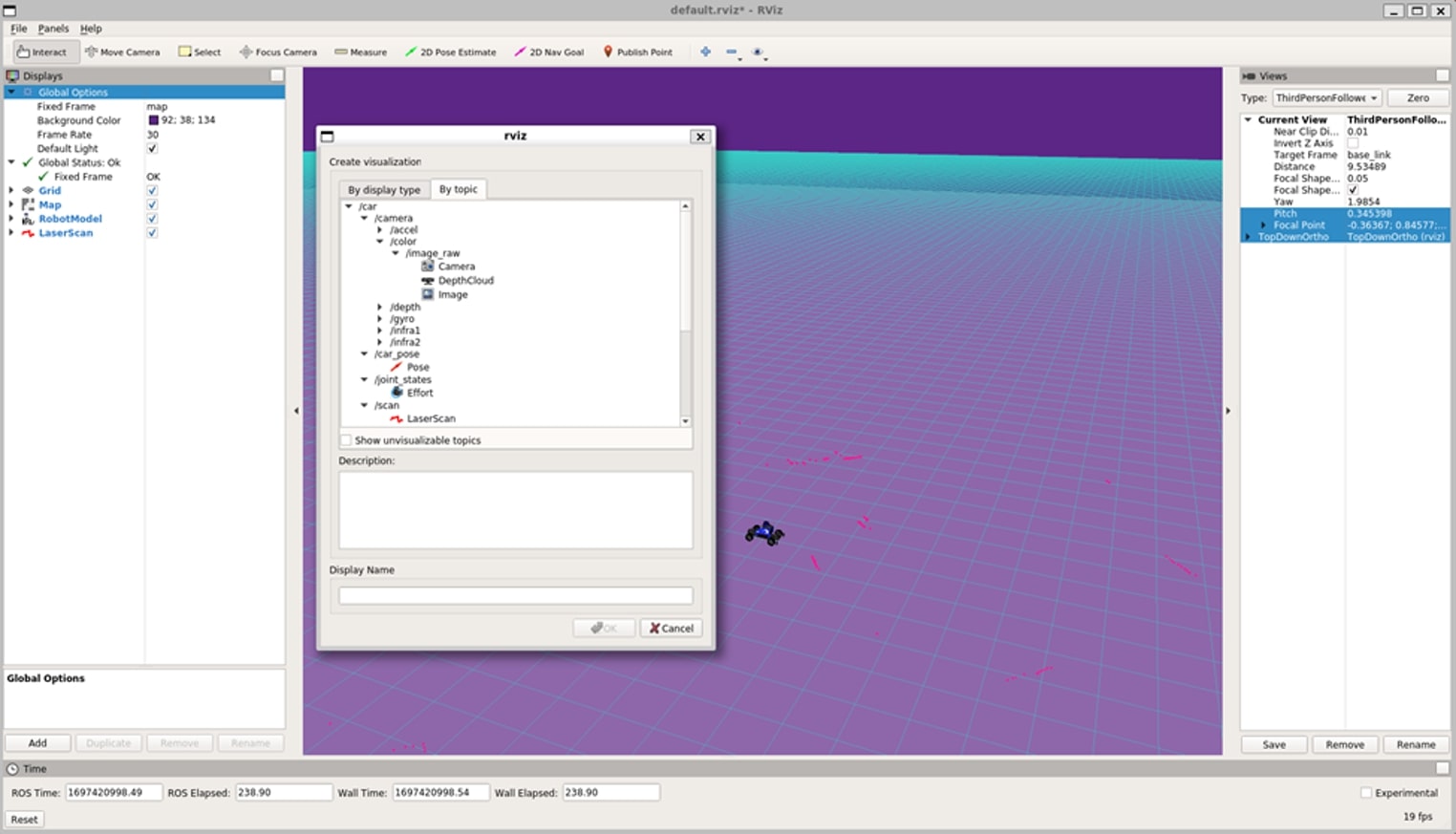
You’ll want to select:
- /car/camera/color/image
- /car/camera/dept/DepthCloud
- /car/camera/dept/image
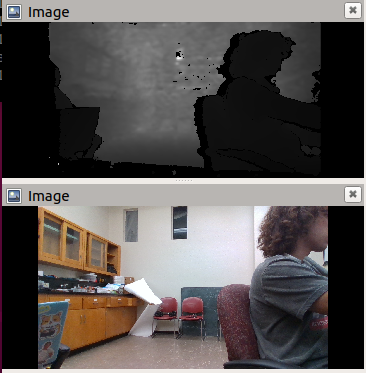
After which, you should be able to see the camera feed in the bottom left and a depth cloud originating at the car model:
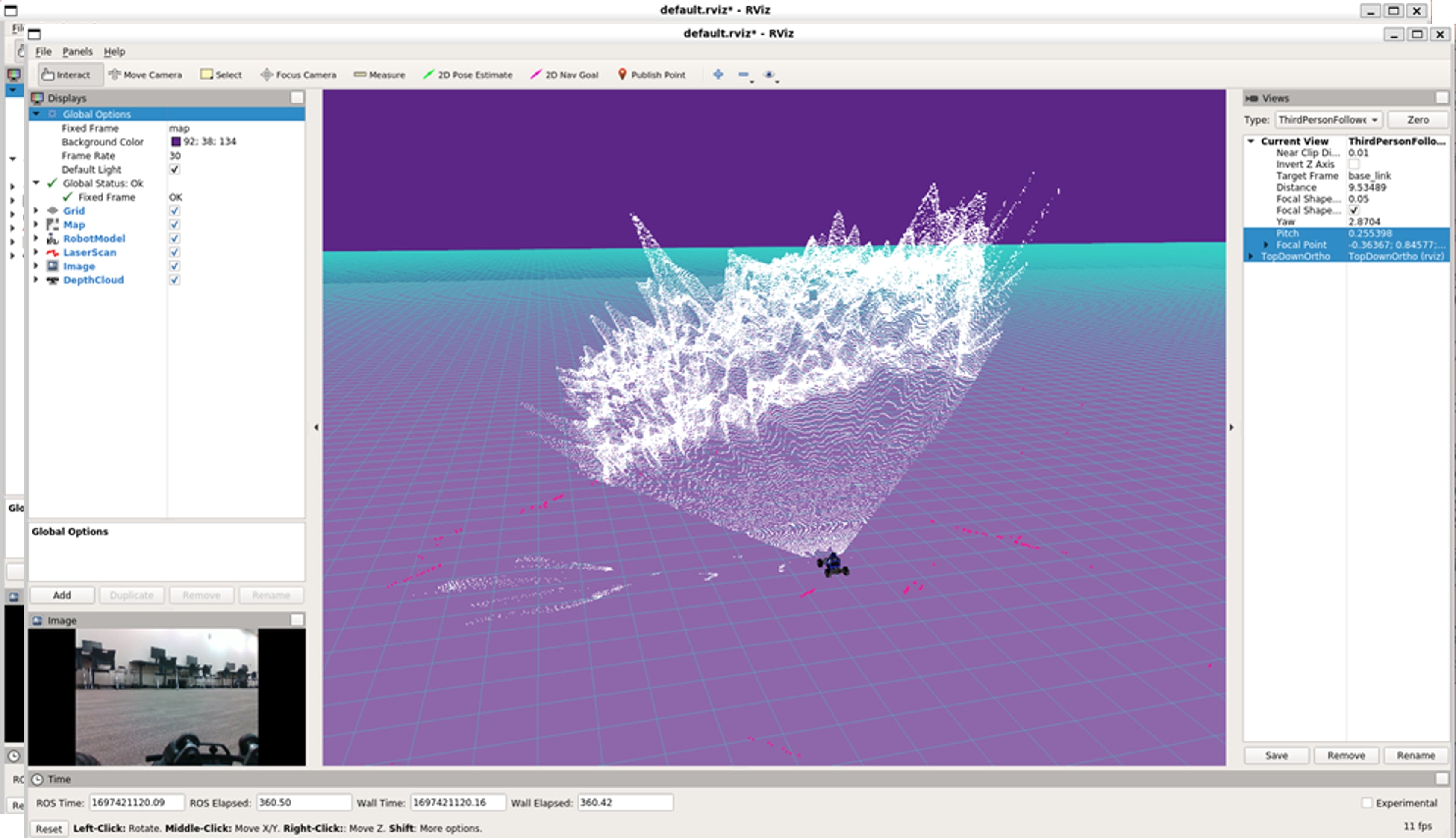
This picture shows the depth camera rgb and depth image topics: