Running The Sensors
Introduction
The sensor launch file used in teleoperation can be found in mushr_hardware.
In this section, I’ll go over how to launch the sensors - both independently and all at the same time - in the scenario where you do not want to enable teleoperation and would just like to configure sensor data.
Steps:
- SSH Into Robot
After turning on the robot and connecting to the WiFi, we first need to SSH into the robot.
From your base computer run:
ssh robot@10.42.0.1
- Navigate to the mushr_hardware directory
The launch file that is executed during teleoperation is located in the mushr_hardware package. To get to the launch file, run the follwing commands:
roscd mushr_hardware && cd launch/racecar-uw-nano
- Run sensors.launch
Run the following command:
roslaunch sensors.launch racecar_version:=racecar-uw-nano
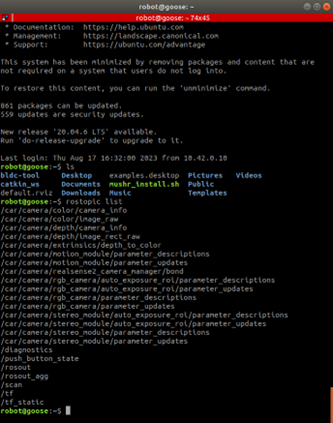
From a separate terminal (either in your base computer or SSH’d into the robot) run:
rostopic list
And you should see a series of topics relating to the sensors.
Note on Sensor topics:
To get any information from the depth camera, look at the topics that contain ../camera/..
- such as ../camera/depth/image_raw and ../camera/color/image_raw which contains depth information and rgb color data, respectively, for the captured frame.
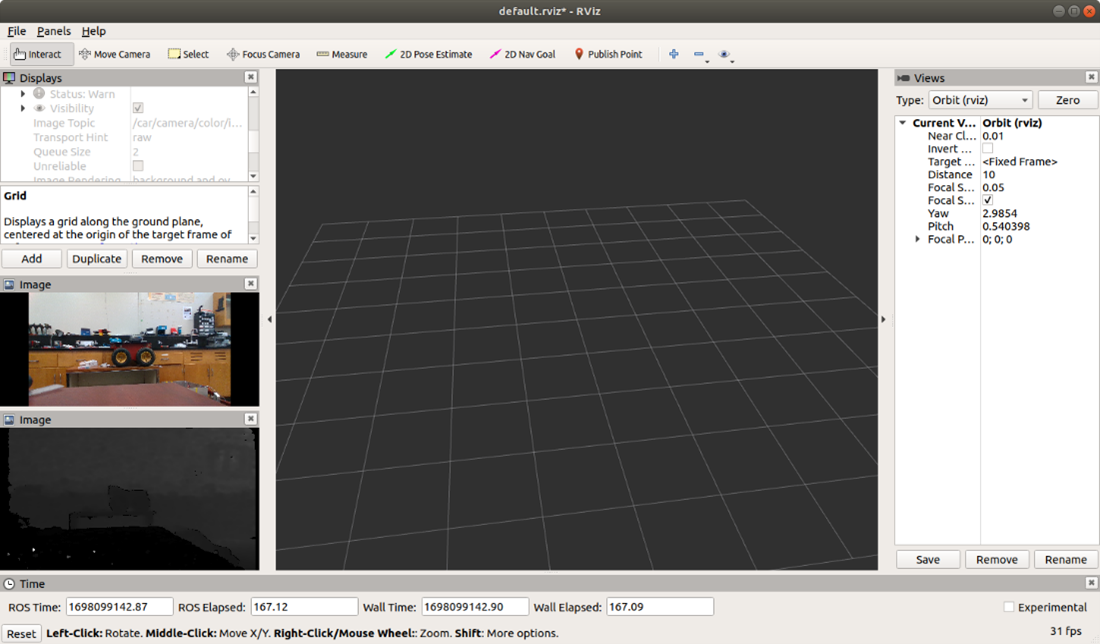
Now if you were to open RVIZ from your base computer, you should see a list of topics that you can add which relate to the sensors onboard the robot
Note on Sensors in RVIZ:
You may not be able to visualize the LiDAR information; in the example below, I show the rgb and depth information from the depth camera.
Explaining sensors.launch
With your text editor of choice, open sensors.launch located in .../mushr_hardware/launch/racecar-uw-nano/:
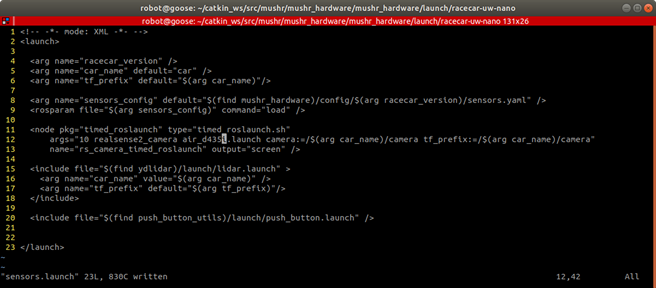
Lines 4-6: we define variables for the roslaunch file
-
racecar_version: For our purposes this will always be racecar-uw-nano and this used to refer to files relating to this version of the car
-
car_name and tf_prefix: This is used to prefix the topic names. You would only want to specify this if you are working with multiple cars and need to differentiate between sensors and topics
Line 8-9: load a sensors configuration file specific to our racecar version
Lines 11-18: launch the sensor nodes which result in sensor data being published:
-
11-14: Launch the realsense depth camera with a 10 second delay
-
15-18: Launch the lidar sensor
Line 20: launches the push_button on the front of the car. As of right now, the push button has no functionality.
Note on single sensor testing:
If you want to just launch one sensor, you can refer to the hardware ROS packages.
For the realsense d435i camera, we run the command:
roslaunch realsense2_camera air_d435i.launchFor the lidar, we run the command:
roslaunch ydlidar lidar.launchFor the t265 tracking camera, we run the command:
roslaunch realsense2_camera rs_t254.launch